LookAhead
LookAhead (LA) to wirtualny punkt w osi podłużnej pojazdu, wyznaczony przed pojazdem. Algorytm prowadzenia steruje napędem kierownicy w taki sposób aby dojechać do tego punktu. Punkt LA przemieszcza się wraz z pojazdem.
Wyższe wartości LA powodują, że napęd kierownicy staje się mniej aktywny (mniej agresywny) jednak precyzja jazdy na odcinkach prostych trasy będzie niższa i pojazd będzie bardziej „leniwie” wracał do ścieżki. W zakrętach zbyt wysokie wartości LA mogą powodować, że pojazd będzie skręcał zbyt wcześnie („ścinał zakręt”) i może to doprowadzić do przekroczenia bezpiecznej odległości od trasy (wypadnięcia z trasy).
Niższe wartości LA powodują, że napęd kierownicy staje się bardziej aktywny (bardziej agresywny) przy czym precyzja jazdy na odcinkach prostych będzie wyższa. Zbyt niskie wartości LA dla odcinków prostych i zakrętów mogą spowodować oscylacje w sterowaniu, które mogą narastać i w rezultacie pojazd wypadnie z trasy ponieważ napęd kierownicy nie będzie mógł nadążyć za wydawanymi komendami skrętu.
System należy skonfigurować w taki sposób aby uzyskać kompromis pomiędzy precyzją sterowania, jakością sterowania i sposobem działania napędu kierownicy.
System AutoDrive podczas jazdy wyznacza dynamicznie odległość punktu LA względem prędkości oraz względem tego czy pojazd porusza się po odcinku prostym lub zakręcie. W zakrętach następuje duże skrócenie odległości LA ponieważ
Komputery GOtrack dostarczane są do klientów z domyślnymi ustawieniami, które zazwyczaj są wystarczające dla prawidłowego sterowania pojazdem. Jednakże w niektórych sytuacjach należy dokonać indywidualnych ustawień dla konkretnego pojazdu. Zmiany ustawień należy dokonywać w następujących menu:
- Przełączanie LookAhead
- Analiza LookAhead
- LookAhead w zakrętach.
Pozostałe ustawienia służą jedynie do celów ekspermentalnych.
Ustawienia LookAhead zgrupowane zostały w osobnym menu LookAhead.
Przełączanie LookAhead
Algorytm prowadzenia systemu AutoDrive używa dwóch ustawień punktów LA:
- dla odcinków prostych
- dla zakrętów
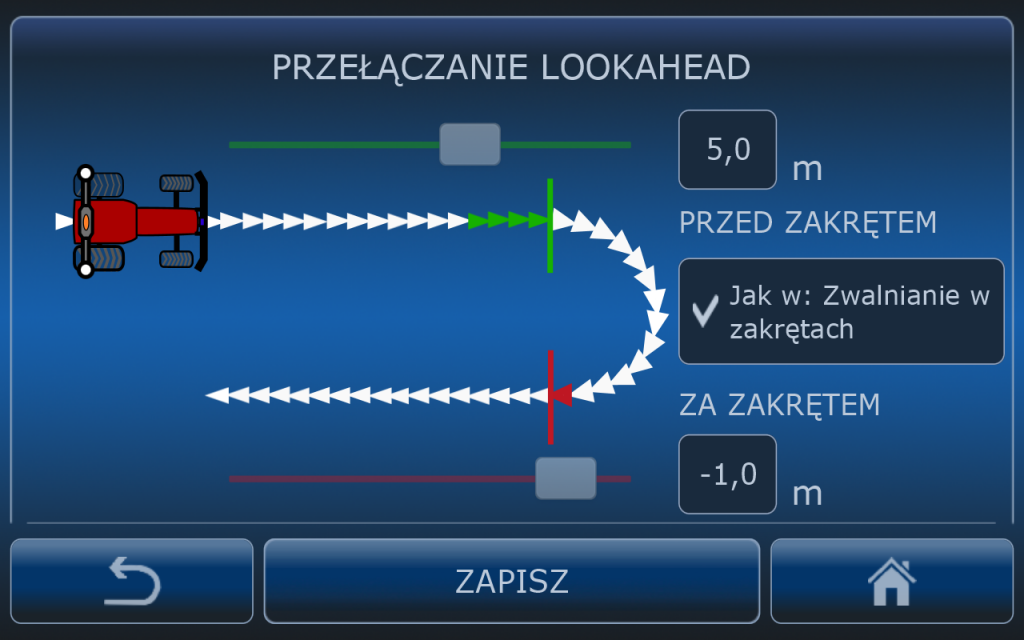
W menu Przełączanie LookAhead dokonuje się ustawień momentu przełączania punktu LA przed i za zakrętem.
Główna zasada jest taka, że system AutoDrive na odcinkach prostych używa wyższych wartości LA ponieważ prędkość jazdy jest wyższa a w zakrętach wartości LA są niższe ze względu na niższą prędkość jazdy oraz kształt trasy.
Domyślnie przełączanie LA powinno odbywać się w punkcie, od którego pojazd zaczyna zmieniać prędkość na niższą przed zakrętem i z powrotem na wyższą jak pojazd zaczyna przyspieszać.
W szczególnych przypadkach można wyłączyć funkcję Jak w: Zwalnianie w zakrętach i dokonać indywidualnych ustawień punktów przełączania LA.
Przed zakrętem
Wartości dodatnie oznaczają ile metrów przed zakrętem nastąpi przełączenie punktu LA. Wartości ujemne oznaczają ile metrów od punktu w którym zakręt już się zaczął nastąpi przełączenie punktu LA.
Za zakrętem
Wartości dodatnie oznaczają ile metrów za zakrętem nastąpi przełączenie punktu LA. Wartości ujemne oznaczają ile metrów przed punktem, w którym zakręt już się skończył nastąpi przełączenie punktu LA.
Analiza LookAhead

W menu Analiza LookAhead dokonuje się ustawień dwóch parametrów:
- zakres prędkości, pomiędzy którymi ma odbywać się dynamiczna zmiana dystansu LookAhead dla prostych odcinków trasy
- zakres dystansu LookAhead, który będzie obowiązywał w granicach zakresu prędkości.
W przykładzie z obrazka wartość LA będzie dynamicznie się zmieniać jeśli prędkość pojazdu będzie oscylować w zakresie od 4 km/h do 10 km/h. Np. przy prędkości 7 km/h LA wyniesie 4 m.
Dla prędkości poniżej 4 km/h LA będzie stały i będzie wynosił 3 m.
Dla prędkości powyżej 10 km/h LA będzie stały i będzie wynosił 5 m.
LookAhead w zakrętach

LookAhead w zakrętach działa na tych samych zasadach jak dla odcinków prostych. Jedyna różnica jest w mniejszym zakresie prędkości oraz o wiele mniejszym zakresie dystansu LookAhead.
Należy pamiętać, że rekomendowana prędkość jazdy pojazdu podczas pokonywania zakrętu wynosi około 5 km/h dlatego w ustawieniach domyślnych zakres prędkości wynosi od 4 km/h do 6 km/h.
Niskie wartości dystansu LA mają na celu zwiększenie precyzji w pokonywaniu zakrętów akceptując tym samym większą aktywność napędu kierownicy.